高速公路服务区停车诱导
发布时间:2018-10-22 08:45:44来源:admin
第一章检车模式介绍
1、传统的检车模式有很多不足,难以满足要求
目前行业内做室内停车诱导的厂家比较多,而且技术相对来说比较成熟,比如采用超声波检测、摄像头检测等手段,而做室外停车诱导系统的厂家并不多,主要因为技术不成熟,准确度不高。
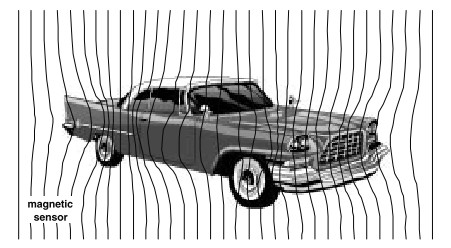
因为地磁技术技术先天缺陷,在高速公路服务区停车检测中,难以达到客户对产品的期待,出现检测不准或者连续工作一周就出现磁饱和的罢工情况,难以满足要求。
分析如下:
①超长大车的检测
和城市内的停车检测不同的是,高速公路服务区也是大货车、超长车辆司机停车的休息区,不同车辆不同高度的地盘,甚至拖挂车等,对地磁的感应能力提出了极高的要求。

②高速行驶车辆的干扰
因为高速公路服务区停车场紧靠告诉公路,高速公路快速、大量车辆的通行,可能会对紧挨的停车位产生持续的、不可预知的磁场扰动,该效应不断累积,使得服务区停车位下的地磁传感器无法有效工作。在实际的使用中,高速公路服务区停车位地磁传感器难以准确对车位上的车辆进行检测。
③“非”字形和斜列式停车干扰
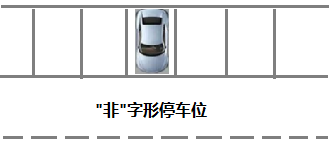
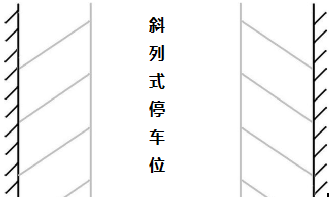
在高速公路服务区停车场对地磁传感器实际使用的测试中,在高速公路停车场“非”字形和斜列式停车位的特殊场景下,停靠车辆距离近,地磁感应器之间的干扰非常显著,检车的准确率难以达到要求。
④其他的干扰
通常根据现场环境的差异,地磁检测准确率也是会下降的。不少公司对此也做过研究,现场环境下大体上对地磁会产生干扰的因素有:树枝树叶遮挡,通讯运营商的3G、4G无线信号,Wifi无线信号等等。想解决这些问题也并不是不可能。采用2.4GHz无线传输的设备需尽可能避免直对繁密的树枝树叶,不然通讯能力大大下降。目前来看,市场上的一些可靠的地磁产品已能有抗击3G、4G以及Wifi无线信号干扰的能力。
另外,同一城市、同一地点、同一路口,不同的是观测时间。大家都了解,同一地点标志着现场来自非地磁无线通讯的影响相同;而观测时间的不同,标志的则是车流量的不同,白天的车流量与凌晨两点之后的车流量完全存在差异。
结果很明显,不同时间段的检测准确率是不同的,车多时会出现过车不检或车离开后不恢复等现象。凌晨的检测准确率达到了100%,而白天的检测准确率却不容乐观。原因很简单,当车流量很大时,特别是有大型公交车或卡车经过时,车辆跟车过于紧密,完全阻挡了地磁与接收机之间的通讯。此状况随车道数增多而明显。也就是说,此无线传输波段很容易被汽车钢结构所吸收,从而很大程度上削弱了检测效果。
⑤电池和内部电路板因素
实验室环境下,地磁电量可使用三年、五年、甚至更久。项目工程中现场安装后,由于频繁过车、频繁检测,从而电池电量不断损耗,使用寿命达不到理论效果。
还有一点,当地磁与中继器或接收机之间连接信号薄弱时,电池功耗也会增加。就像信号较弱的情况下,其辐射伤害会随之加强。这也是影响电池使用寿命的关键因素。
所有电子产品都一样,使用寿命与电路板的含金量成正比。地磁之所以能实现检车功能,也是通过其电路板上的各芯片功能实现的。若芯片含金量不足,出现损坏,也就会导致地磁使用寿命短暂。所以,电路板的原材料选择、焊接技术以及内部各接头的精准处理也至关重要。
实际应用中的地磁设备,使用三个月六个月之内完全没有问题,但时间久了,都会出现这样或那样的故障。市场上的供应商对地磁设备寿命的使用时效宣传有五年、八年、甚至十年之久,可是这些因素加在一起,可见地磁设备并没有想象中的那么优秀。

在市内能基本满足路测停车检测的地磁传感器,在高速公路服务区的检车方面,遇到了极大的挑战,但是,出路在哪里呢?这就是凡德科技基于改进的深度学习算法的图像识别检测技术。
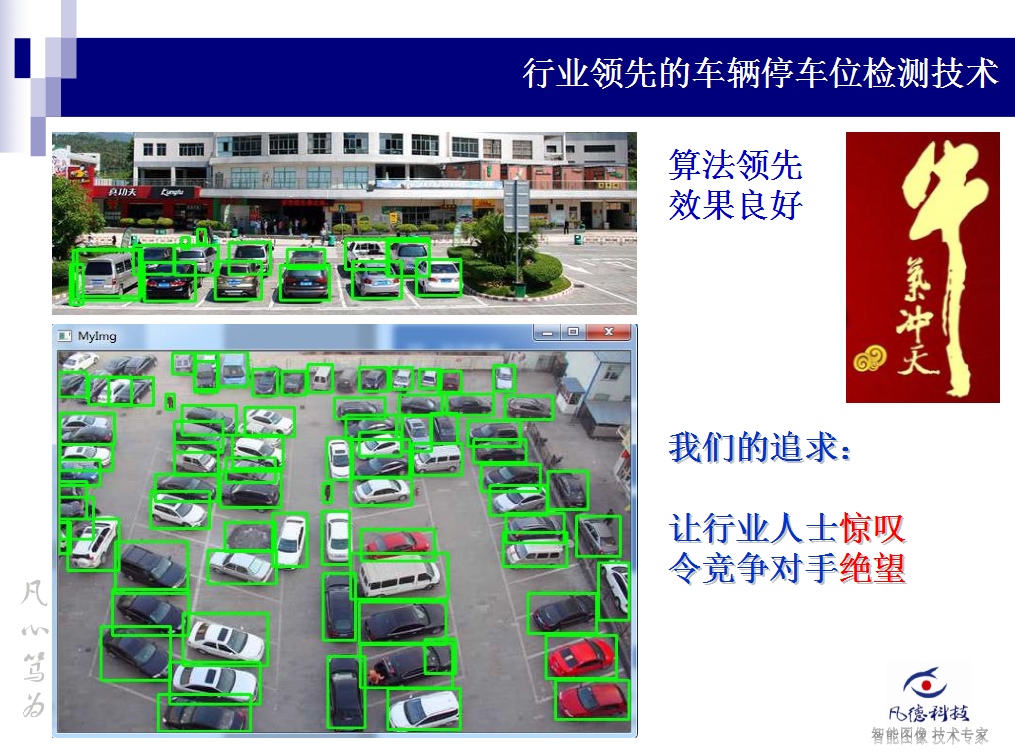
2、凡德科技图像识别用于停车位车辆检测优势显著
凡德科技采用改进的深度学习算法,采用球机高杆的方式进行大面积停车数量检测管理,达到极佳的效果和极好的性价比。
(1)使用球机,可以360°旋转,检测区域广

(2)多区域管理
使用球机可以360°转动的特点,一个摄像机,可以同时检测多个区域。
(3)对车辆进行分类识别
凡德科技图像识别能够对小车、大车、自行车、摩托车、行人等进行分类识别,便于根据停车位情况,分类提示、分类诱导。
(4)识别不在停车位上的车辆
根据交通运输部对高速公路服务区服务质量检查的标准要求,对未在停车位的车辆,要技术提醒;本系统能实时识别不在停车位上的车辆情况,然后通过两种方式通知安保人员或者司机:
l 后台系统提醒
后台系统能够发现和提醒不在停车位的车辆,即使提示;根据需要,可以在安保人员的APP上提示。
l 高音号角
通过现场的高音号角,在非停车位停车行为发生时,立即提醒车主文明停车。
(5)与抓拍违停相结合
对于停车位上的车辆,进行准确地统计检测;对于停车位外面的违停车辆,可根据需要进行违停抓拍。

第二章 总体设计
第一节 系统结构
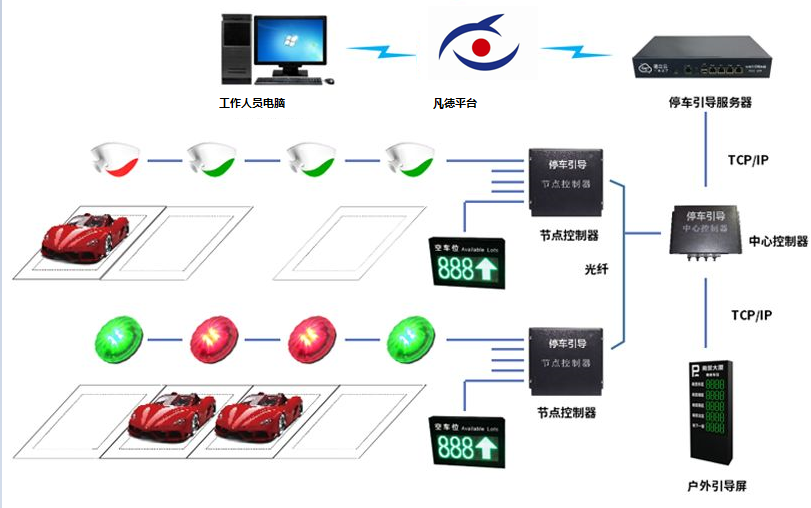
系统结构示意图
第二节 点位布置
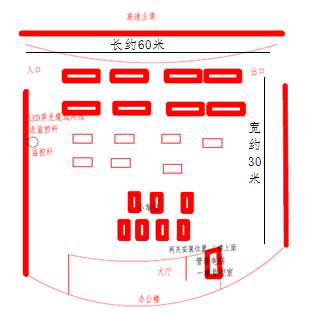
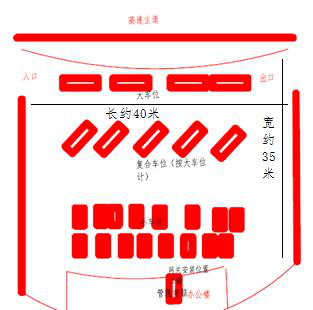
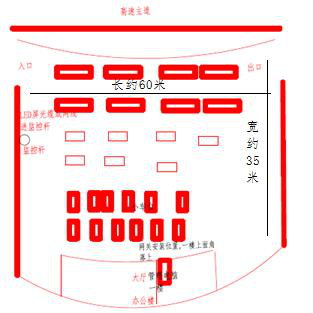
全程无死角设计,使用三角模式布点。
1、布点样例
第三节 系统组成
停车智能导流管控系统由前端子系统、控制中心子系统以及后端管理子系统两大部分组成,实现对高速服务区机动车停车引导、车辆类型统计、车辆停放安全监控的自动抓拍、记录、传输和处理。
1)前端子系统
快速球机(如下图),前端采用数字高清球形摄像机,支持200W高清视频;

快速球机
本系统对数字高清摄像机型号没有特别限制,但使用推荐的球机型号能达到较好的抓拍效果。
2)平台中心子系统(包含控制中心子系统和后端网管子系统)
控制中心子系统:停车智能导流管控系统主机,通过访问智能导流监控主机,用户可以查看停车区域抓拍点的实时视频,同时通过访问对监控的区域进行空闲车位检测,车辆类型统计,停车区车辆安全监控。

停车智能导流服务器主机系统
后端管理子系统:主要用于全网的集中管理存储中心,集中管理全网的智能导流抓拍点,并存储全网的智能导流监控证据(图片和视频),以供统计分析之用。中心管理平台由平台软件模块搭载的服务器组成,包括:管理服务器等。
系统对服务区空闲车位进行实时统计,将服务区空闲停车位信息发送到道路LED诱导电子屏。对进入服务区车辆进行车型统计分析。对停放车辆进行安全监控。系统具备空闲车位自动检测、自动球机控制、车辆类型统计信息输出一整套功能。系统支持大范围、多视角、不间断的巡航自动监控。完全替代人工控制。
网管子系统功能强大,能通过网管平台实时知晓每一个摄像机抓拍工作的情况,可能的网络故障等。
动态、实时显示的网管信息包括:
l 摄像机网络连接情况信息;
l 摄像机获取图片成功/失败信息;
l 服务器主机网络状态信息;
l 实时视频信息;
l 抓拍系统心跳信息;
l 车辆类型统计;
l 停车诱导工作状态查询与修改管理;
l 其他系统平台网管信息。
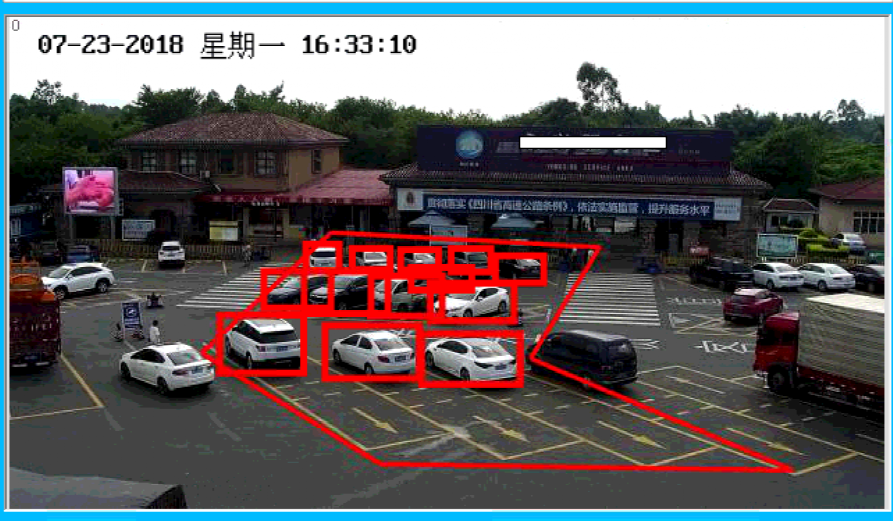
第四节 系统车位检测原理
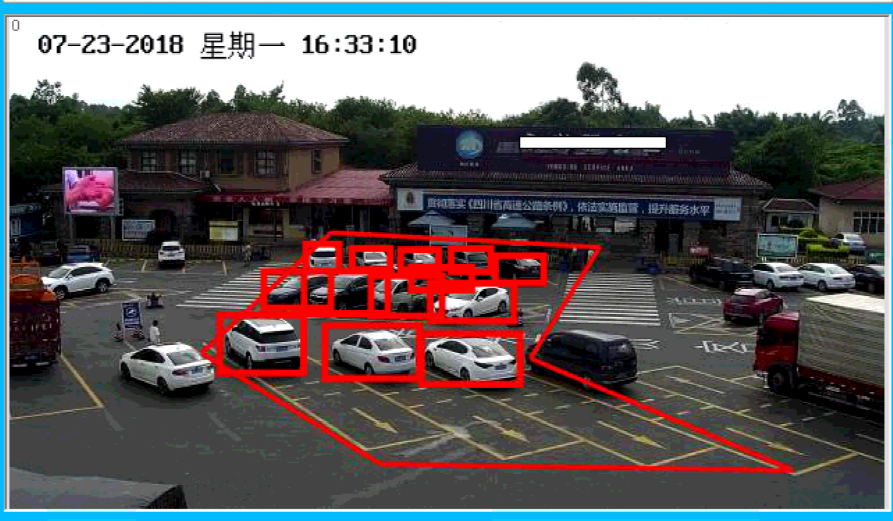
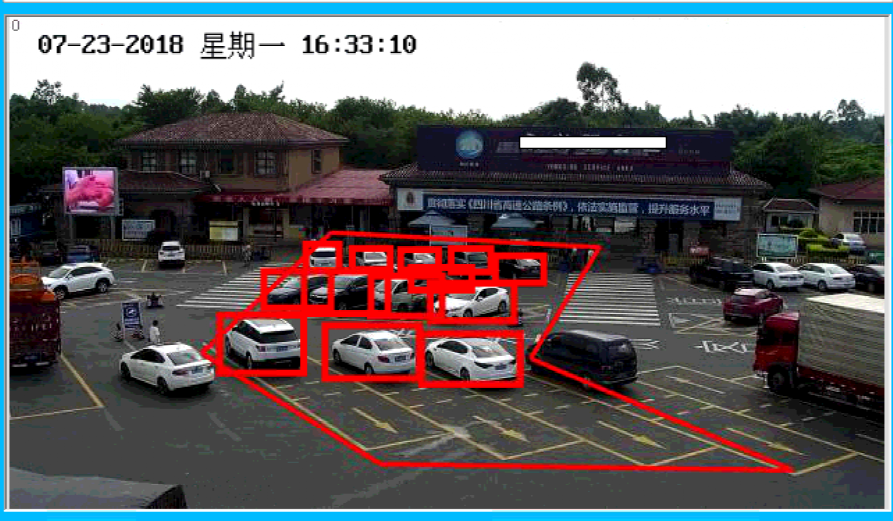
在系统中设置球机获取图像,通过神经网络智能学习各型车辆的特征点,机器视觉能有效区分各种车型,对非正规停车(占用多车位)车辆进行正确识别车辆数量。
![]()
![]()

图片1
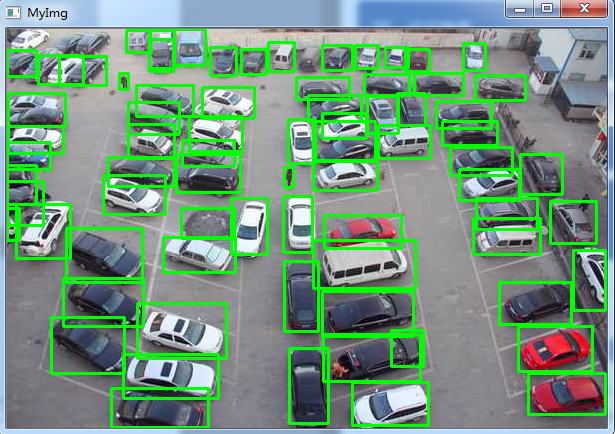 图片2
图片2
第五节 功能描述
1. 空闲车位检测
系统对服务区现有停车位,通过机器视觉智能检测,实时对空闲停车位信息发送到道路LED诱导电子屏。
2. 车辆类型统计
系统对服务区所停车量类型进行统计分析。
识别对象包括:
l 人;
l 小汽车;
l 货车。
3. 实时自动传输通能
对空闲车位信息,自动连接LED平台系统,安全监控信息,通过网络能实时自动传输到停车智能导流系统集中管控中心。
在此传输的过程中,系统能全自动处理,无需人工干预。
4. 网络管理能力
停车智能导流系统具备网管能力,能通过网管平台实时知晓每一个摄像机的工作情况,可能的网络故障等。
5. 停车诱导能力
即对空闲的停车位信息进行采集,通过LED屏进行发布,并能对接第三方的APP进行停车诱导服务。
6. 系统快捷扩容能力
系统扩容、升级须简单可行;在后端平台容量有富余的情况下,前端仅需增加普通网络摄像机即可。
为有效利用资源,系统支持新增加的网络摄像机的能力的同时,也支持对已有旧的普通网络球机的控制能力。
支持现成的、普通的网络球机。
支持不同像素规格(720P、960P和1080P)。
支持新旧多个厂家的网络摄像机。
7. 系统具备360°角度、远距离多区域监控能力
系统支持360°角度的巡检,统计空闲车位,统计车辆类型。系统响应的时间小于10秒。
系统支持以摄像机为圆心,以100米为半径的区域画定多个监控区域的能力。
8. 系统须支持高效率的并行监控能力
同一监控点可设置多个(不少于8个)监控区域进行自动巡航
可以在监控区域上画线、设置多个(不少于5个)相应的监控区,系统将检测停车区空闲车位,统计所停车辆类型。
9. 备份存储功能
系统能够自动将信息上传系统上端;当通信发生故障时,系统采集的车位信息在监控主机做备份存储,具备滚动保存30天以上数据的能力,存储空间与其他数据存储相平行,不互相冲突。
10. 数据断点续传功能
系统支持断点续传功能。当遇到网络中断或其他故障时,车辆信息存储在前端设备中,待故障排除后自动续传。
第六节 性能指标描述
|
|
项目 |
指标 |
|
1 |
白天车位检测率 |
有效监控区域内白天总计车位漏检率小于5% |
|
2 |
晚上车位检测率 |
有效布防区域内夜晚有效关照条件下总计漏检率小于20%; |
|
3 |
检测区域范围 |
高清球机最小有效检测距离≥80米,支持多区域检测 |
|
4 |
摄像头 |
能同时支持720P、960P、1080P以及300万以上像素网络高清球机抓拍 |
|
5 |
车位诱导 |
空车位识别准确率>95% |
|
6 |
兼容不同品牌摄像机数量 |
≥3个(主流品牌) |
第三章 中心平台系统设计
第一节 平台概述
停车智能导流系统软件平台,是一个基于服务器、操作系统、依托于数据库、架构于网络的服务系统,是支撑起停车诱导和出入口控制系统产品的中央管理平台,一个能够实现设备接入与用户服务的综合软硬件体系。平台利用统一的数据库、软件及服务,接入分散的设备并建立用户、业务接口,以完成分散设备的统一管理并提供用户业务需要的服务。
第二节 中心平台结构设计
1、 平台主要设备、模块
中心平台包括:中心服务器,车位分析系统,车型分析系统,停车引导服务器
第三节 中心平台架设环境设计
平台系统架设在完整的服务器体系之上,并通过其操作系统、应用程序等组成的软件架构体系与直接面向用户的浏览器实现人机交互。完整的平台,需要依托于高速、稳定的网络环境,才能够实现高效、安全、便捷的运行。
1、硬件环境及服务器参考配置方案
硬件服务器承担了平台软件的架设、数据的存储等重要任务,因此要求服务器高效、稳定,具有能够承担高吞吐率的大容量硬盘作为存储单元,具备高速处理器,实现平台内外数据的高效、高速、稳定地传输与处理。
以下为能够确保实现后端管理中心平台正常运行,所建议的服务器技术参数:
英特尔i5/i7 CPU
英伟达 1050Ti 独立显卡
内存:DDR3,8GB
不低于2TB(2块2TB企业级硬盘)。
2、软件环境
Ø Windows7 64位系统
3、网络环境
具有足够的带宽,支持各种多媒体业务和确保实时处理;
可靠的网络结构,支持系统不间断运行;
网络具有开放性,采用标准的接口方式;
网络具有较好的可扩性,方便将来各系统扩展;
具有很强的网络管理能力,便于网络维护、运行管理和网络安全。
第四章 设备安装要求
第一节 设备架设规格要求
设备的架设的指导原则为便于系统有效工作,最大化发挥出系统特征,监控有效面积最大化。为此,需遵从如下要求:
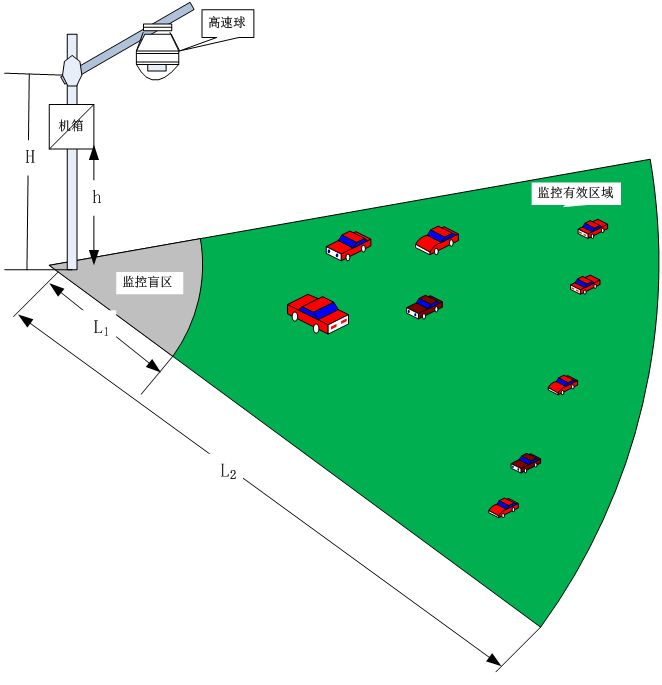
⑴、为了防止设备阻碍正常的道路畅通,或设备被人工破坏,机箱离地面的高度(见下图中的h)应高于1.8m,悬挂前端视频采集设备的立杆至少在8M以上。
⑵、由于系统的物理约束,存在一定面积的监控盲区(见图中的灰色区域)。该区域的大小与前端视频采集系统的安装高度有直接的关系。
⑶、监控的有效区域(如下图绿色区域所示)受立杆的高度和前端设备的光学变焦能力双重影响。如需监控较宽广的区域,需增大立杆的高度和摄像设备的光学变焦能力;
⑷、监控区域应尽可能开阔,避开高的建筑目标或树木遮挡摄像机视线,削弱系统的有效视野。
⑸、系统安装选址时,应尽可能让前端视频捕获系统有效视角内看见停放车辆的车头或者车尾部分居多。俯视车辆或者侧面监控违停车辆。
第二节 系统安装示意图
相对与现有地磁系统,安装简单,设备投入少,仅需网络摄像头立杆安装。
第五章 成功案例
西部某省某高速公路共计6个服务区的停车诱导系统成功运行,深得客户好评。